Overview of Past Work
Over the past few years, Shaobing was engaged in three lines of research, i.e., scalable motion planning and control for CAVs, AI-driven sensor-level augmented reality, and eco-speed planning for automated vehicles.
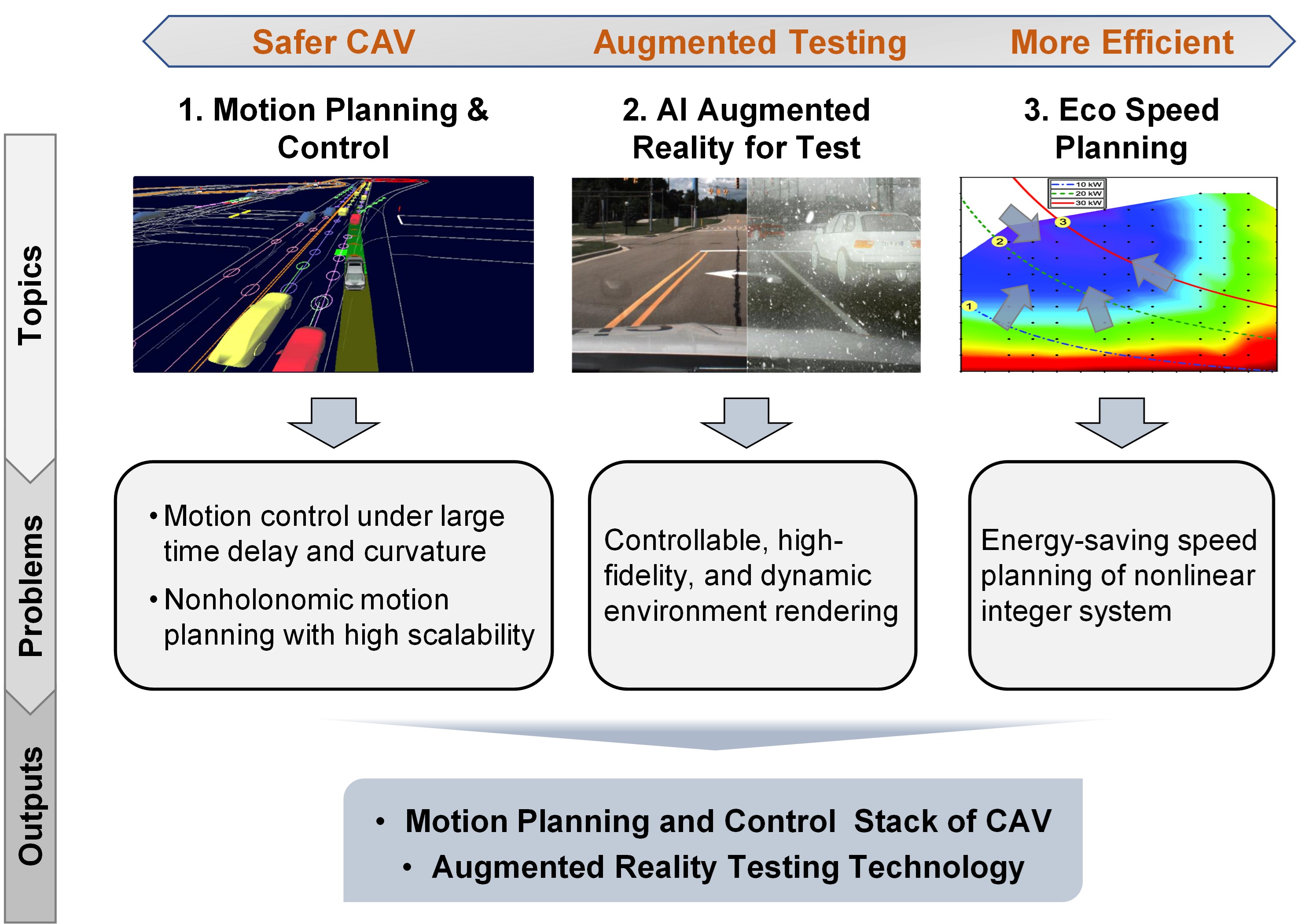
1. Motion Planning and Control of Autonomous Vehicles
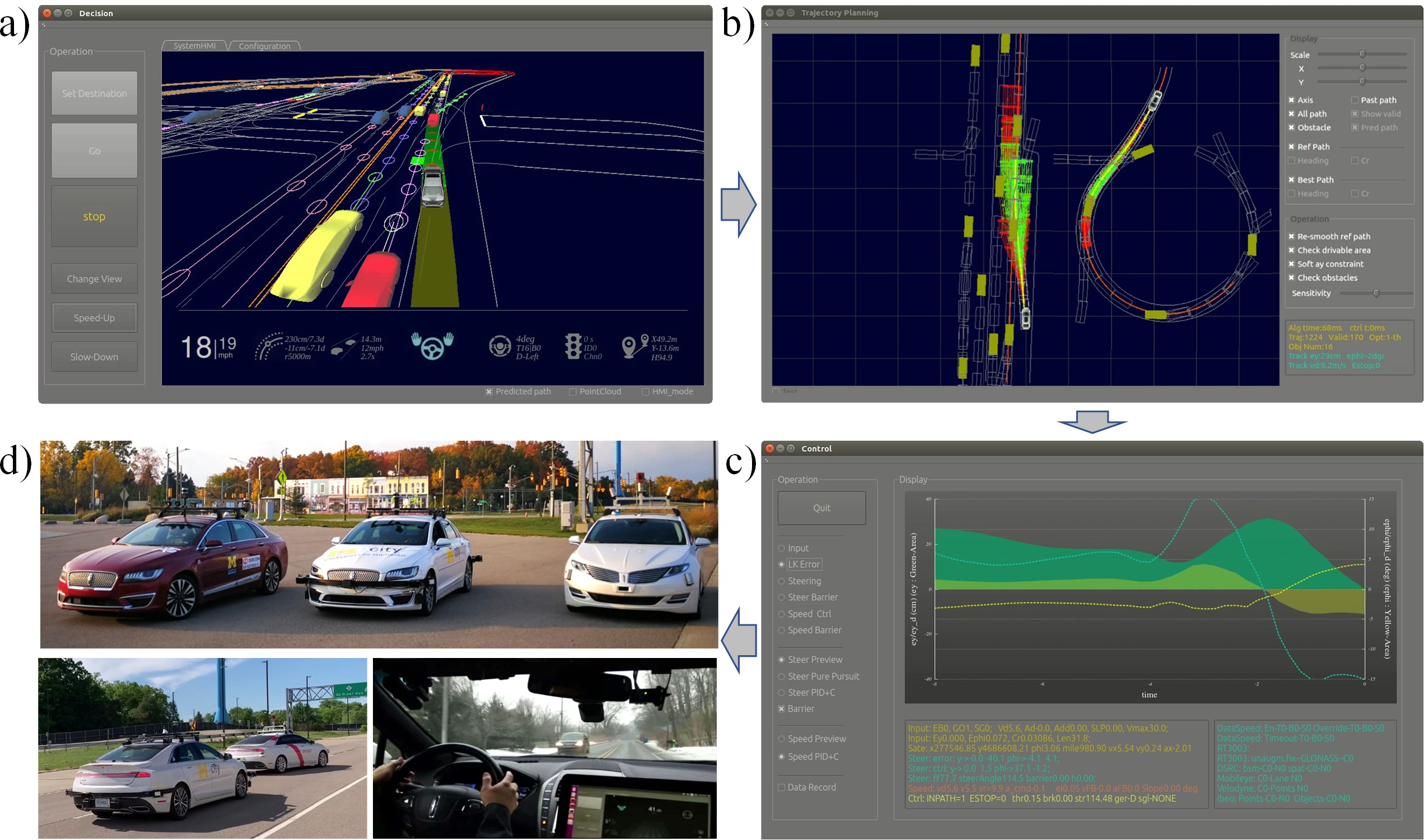
As a postdoc and researcher at Mcity, he developed and deployed a scalable motion planning and control algorithm/software stack for Level-4 CAVs, refer to the below figure. Especially, i) A delay-and-dynamics-aware preview motion control algorithm is proposed, targeting challenges of large time delay, steering lag, and time-varying path curvature. It has some unique features: higher stability against delay, look-ahead capability, and analytical control law which means computationally efficient. ii) A deterministic sampling trajectory generation algorithm is developed, which can be used in various, not one or some predefined, scenarios and can achieve smooth near-optimal trajectory within bounded computing time. iii) Algorithms for speed tracking, behavior planning, and motion prediction are also designed. On top of these algorithms, a full motion planning and control software stack is developed, which was deployed and tested on the Mcity CAV fleet.
Click on this link or the image below to watch a video.
Refer to the following papers for more details.
- Motion Planning and Control Stack
- Design of Preview Tracking Control
- Preview Control Considering Delay and Lag
Services to top media and visitors.
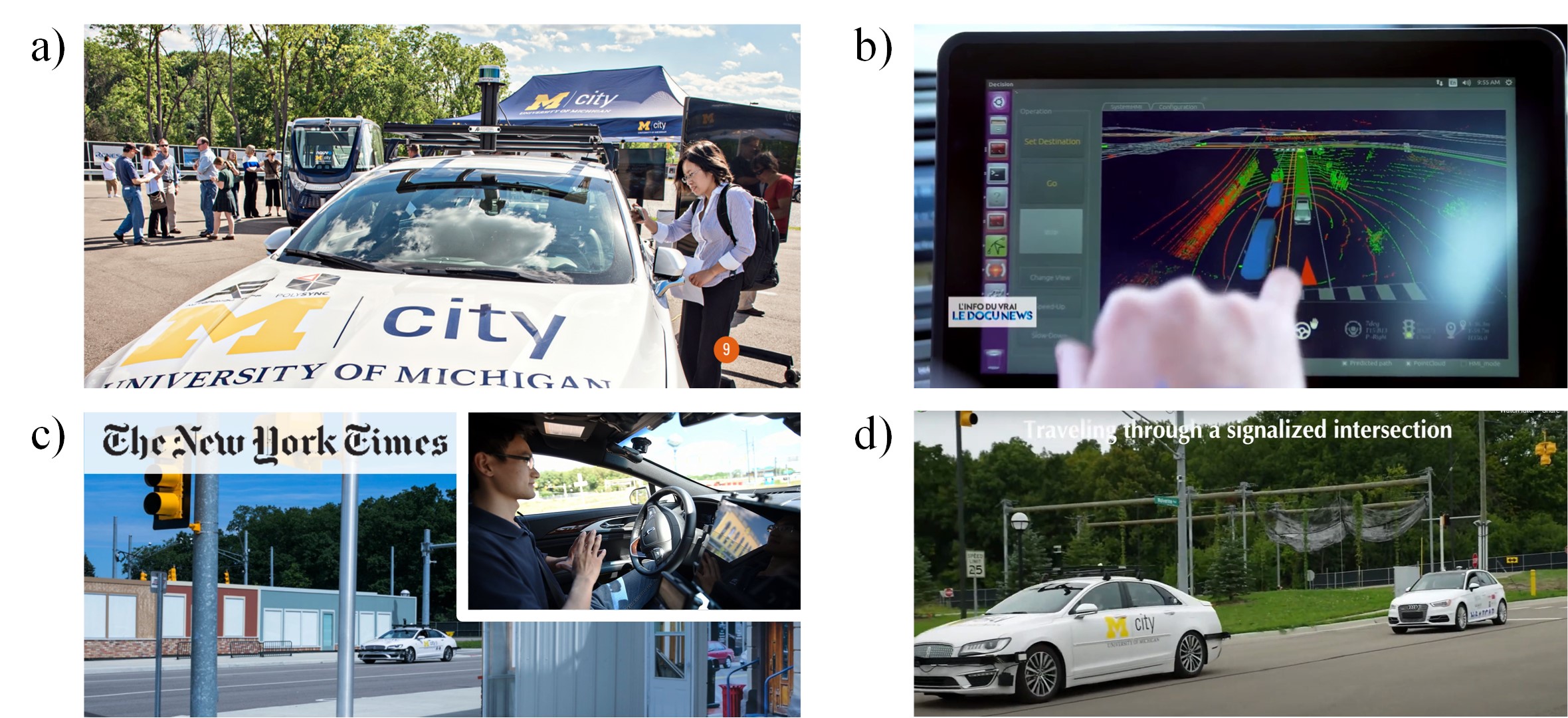
2. AI-driven Augmented Reality for Adversarial CAV Testing
Motivated by the embarrassing dilemma that most closed CAV proving grounds do not have an adversarial traffic environment for testing, we proposed and developed an AI-driven sensor-level augmented reality (AR) concept, algorithm pipeline, and software tools to generate an adversarial environment. It can augment the raw sensor data captured in an empty track with diverse weather conditions (e.g., snow and rain) and interactive traffic flows (e.g., cars and pedestrians). Such kind of augmented reality enables the CAV to safely experience various weather/traffic challenges in limited time and space. The system has a few unique features when rendering the virtual weather and traffic: controllable, high fidelity, and dynamic. It has been deployed to the Mcity testing track and serves the daily testing.

3. Energy-Efficient Speed Planning for Automated Eco-Driving
The primary focus is on how to determine the fuel-minimized driving strategies and synthesize the servo-loop controllers in the presence of powertrain nonlinearities, including engine non-convex fueling characteristics and transmission discontinuity. Different from the data/statistics-driven methods, we propose to obtain the eco-driving strategies by model-based optimal control and revealed the energy-optimal driving operations in 3 typical scenarios, i.e., cruising, accelerating, and driving on slopes. The eco-driving strategies as well as their underlying mechanism and servo-loop control law are revealed. This work may provide reference algorithms for the design of automated eco-driving in sparse traffic flow.
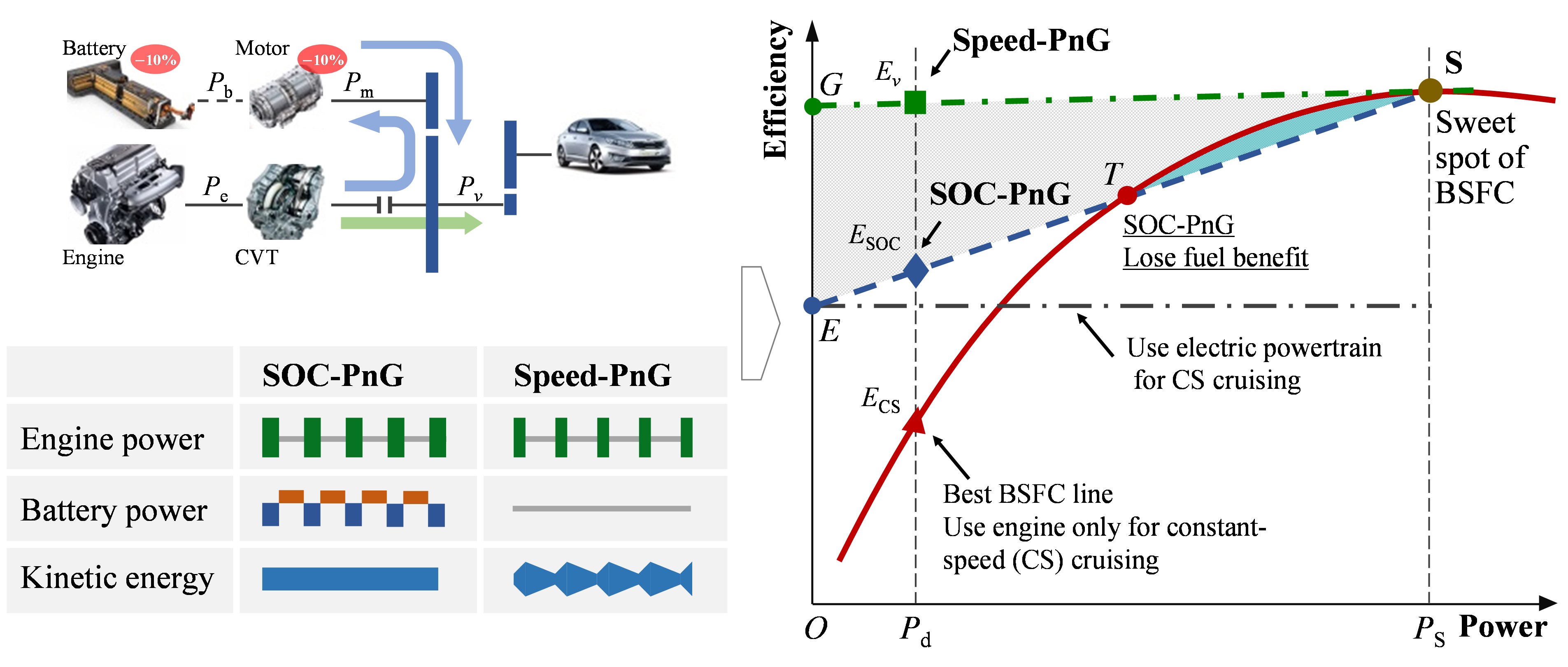
If you are interested in how to use minimal fuel (energy) to accelerate a car, cruise on highways (for both conventional vehicles and HEV), and drive on varying slopes, please refer to the following papers for detailed algorithms and why.